- 浙江省杭州市钱塘区金茂园区
- sales@oubang-motor.com
- 周一至周六 8:30–17:30(节假日除外)

-
-

致电我们
13386500960
致电我们
13386500960不少工业端机器人研发从业者都遇到过关节传动部件选型难题:要么体积过大装不下,要么扭矩不足带不动负载,精度不够还会影响作业稳定性。本文就拆解减速电机在智能机器人关节中的应用要点,为大家提供实用参考。
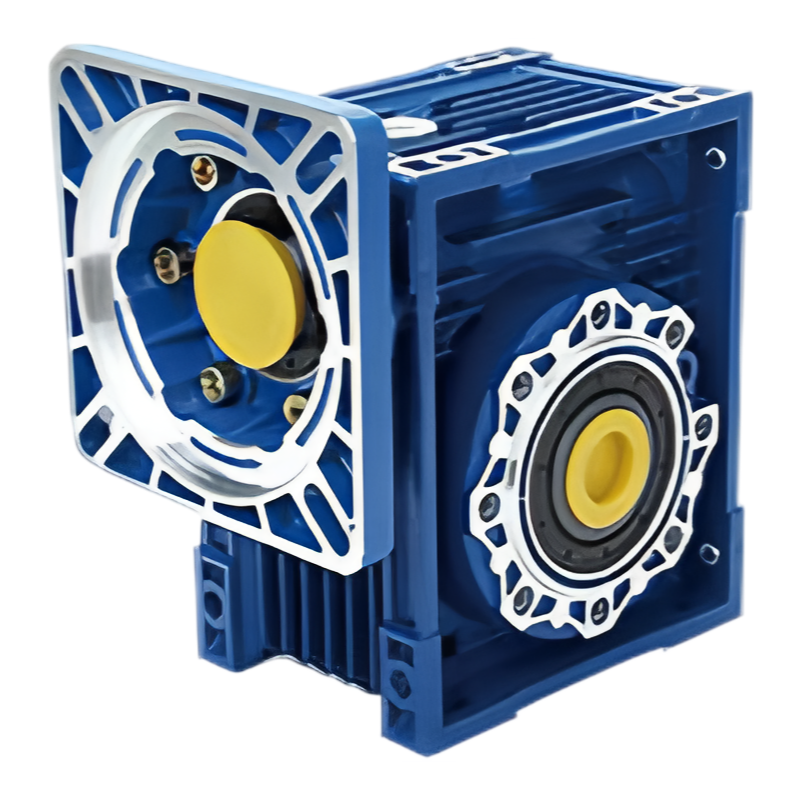
一、机器人关节用微型减速电机的基础原理
机器人关节配套的微型减速电机属于集成式传动部件,核心结构由微型驱动电机、高精度减速箱两大模块封装而成,符合机械行业传动部件的通用设计标准。其工作逻辑为驱动电机先输出高转速低扭矩的动力,经由减速箱内的行星齿轮/谐波齿轮结构传动后,按固定减速比降低输出转速,同时放大输出扭矩,还可降低传动过程中的背隙,满足机器人关节的精准力控需求。
二、核心性能优势与适用边界
这类减速电机的核心优势首先是扭矩密度高,相同体积下输出扭矩是普通无减速结构微型电机的6-12倍,可在关节狭小空间内满足负载驱动要求;其次是传动精度高,高端型号背隙可控制在0.5弧分以内,传动效率稳定在85%以上,长期运行损耗低。
不同型号的适用边界清晰:直径20mm及以下的微型减速电机适配桌面教学机器人、小型服务机器人的轻负载关节;直径30-40mm的型号适配10kg负载以内的工业协作机器人关节;直径50mm以上的型号则适配重载AGV、户外作业机器人的大负载关节部位。
三、选型逻辑与安装注意事项
选型可按照三步法操作:首先明确关节的额定输出扭矩、最高运行转速、允许安装尺寸三个核心参数,缩小可选范围;其次根据作业精度要求筛选适配背隙的型号,高精度场景优先选谐波减速结构的产品;最后根据作业环境确认防护等级,户外、潮湿场景需选IP65及以上防护的型号。
安装时需注意两个核心要点:一是保证输出轴与关节负载的同轴度误差不超过0.02mm,避免输出轴额外承受径向载荷导致断轴;二是首次运行前需按产品说明书要求加注专用润滑脂,运行满1000小时后补充润滑,降低齿轮磨损风险。
以上就是微型减速电机在智能机器人关节中的核心应用要点,如果您有减速电机定制、选型匹配的需求,可随时联系我们获取一对一技术支持。